
产品中心
Products



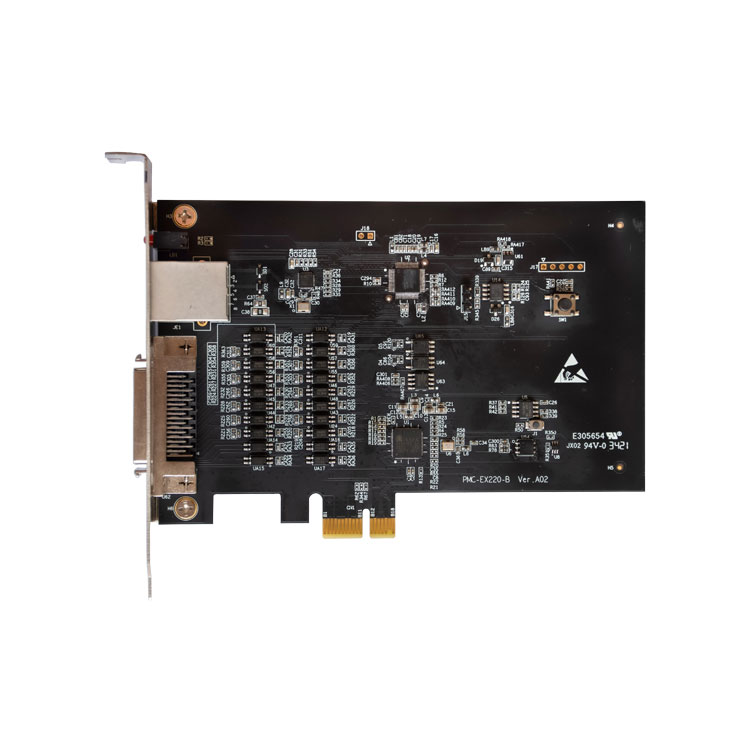
PMC-EX220
PMC-EX220系列EtherCAT总线控制卡基于专用ARM做实时主站,可实现最多96轴的伺服定位及同动/不同动控制。结合MCSL运动控制函数库,具备运动控制各项功能。在输入输出部分,除了可扩展连接标准EtherCAT总线IO模块,还提供了14进6出本地IO及ADC、DAC接口。此外还提供了1路编码器比较输出和1路MPG手轮输入功能。
l 支持点位控制、直线插补、二维及三维圆弧插补、螺旋线插补功能、等线速度或等角速度锥线插补功能、电子齿轮、电子凸轮功能(部分选配)
l 跟随刀功能
l 先进的插补算法:可选前加减速或后加减速方式
l 高速轨迹连续插补,速度平滑化处理
l 手脉跟随功能
l 正反运动学转换功能适用于关节机械手(选配)
l 缓冲区本地IO管理和运动延时功能
l 反向间隙补偿和螺距误差补偿功能
l 位置比较输出
l 梯形/S形对称加减速曲线、用户自定义加减速曲线
l 客制化运动曲线规划,适用于特殊的运动控制需要(选配)
l Group(群组)功能实现多轴同动或不同动的差异需求
硬件参数
型号
PMC-EX220
总线
PCIe
电机驱动支持类型
EtherCAT总线型伺服
最小同步周期
125us
控制轴数
最大96轴
编码器输入(手轮功能)
1 路 (7进1出手轮IO)
本地通用数字IO点
14进6出
模拟量输入输出
1 DAC &1 ADC
转接板及线缆: CBB-PMCE00、C-36-15
扩展IO卡:EIO-16_16_00-2
-
-
暂无内容
-
-
暂无内容
- 上一个:机器人控制系统(分体)
- 下一个:AMC-EX322